MARS - Overview¶
Mixed Adaptive Random Search (MARS) is a black-box optimization method for problems of the form
where \(f\) is a real-valued objective function and \(\mathcal{X}\) may contain continuous, integer, and categorical variables. Throughout the library and the documentation, we use trial, solution, and point interchangeably for an evaluated element of \(\mathcal{X}\).
The implementation in marsopt should be read as an elite-based stochastic search heuristic: it begins with random exploration, then perturbs strong previous trials with gradually decreasing noise. The mathematical descriptions below are intended to explain the implemented behavior and its design rationale, not to claim a formal global-optimality guarantee.
1. General Structure of MARS¶
At a high level, MARS combines four ideas:
Initial random exploration
The first trials are sampled directly from the user-defined search space.Elite-guided sampling
After enough trials have been collected, new candidates are generated around a subset of the best completed trials.Adaptive noise scheduling
The perturbation scale is reduced over time so the search moves from broader exploration to more local refinement.Mixed-variable handling
Continuous, integer, and categorical variables are handled within the same optimization loop using variable-type-specific sampling rules.
Let
\(N\) be the total number of trials,
\(t\) be the current trial index, with \(1 \le t \le N\),
\(p_t = \frac{t}{N}\) be the progress ratio.
2. Elite Count Schedule¶
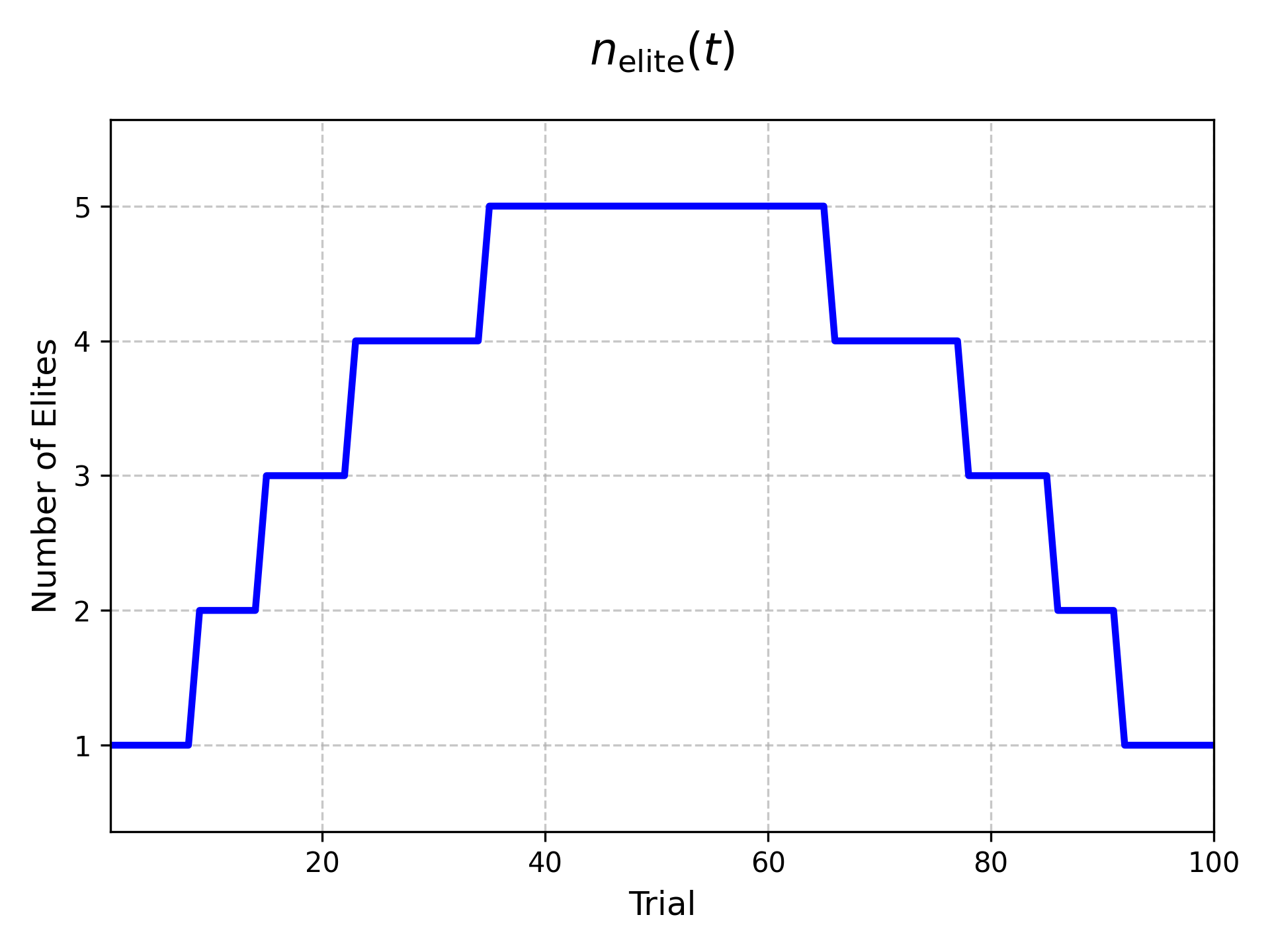
Once the adaptive phase starts, MARS uses a time-varying elite count
This bell-shaped schedule is small at the beginning, largest near the middle of the budget, and small again near the end. In practical terms:
early in the search, a very small elite set keeps the search signal sharp;
mid-search, a larger elite set injects more diversity;
late in the search, the elite set shrinks again so the method concentrates on refinement.
Visualizing \(n_{\text{elite}}(t)\)¶
The corresponding plot shows that the number of elites starts near 1, rises in the middle, and then returns toward 1 near the end of the run.
3. Noise Scheduling with Cosine Annealing¶
Let \(\eta_{\text{init}}\) denote the initial noise level (default \(0.33\)). If the user does not provide a final noise level explicitly, the implementation uses
The additional lower bound of \(10^{-7}\) prevents the final noise from collapsing to zero for very large budgets, ensuring that late-stage perturbations remain numerically meaningful.
Define the cosine annealing factor
Then the noise level used by MARS is
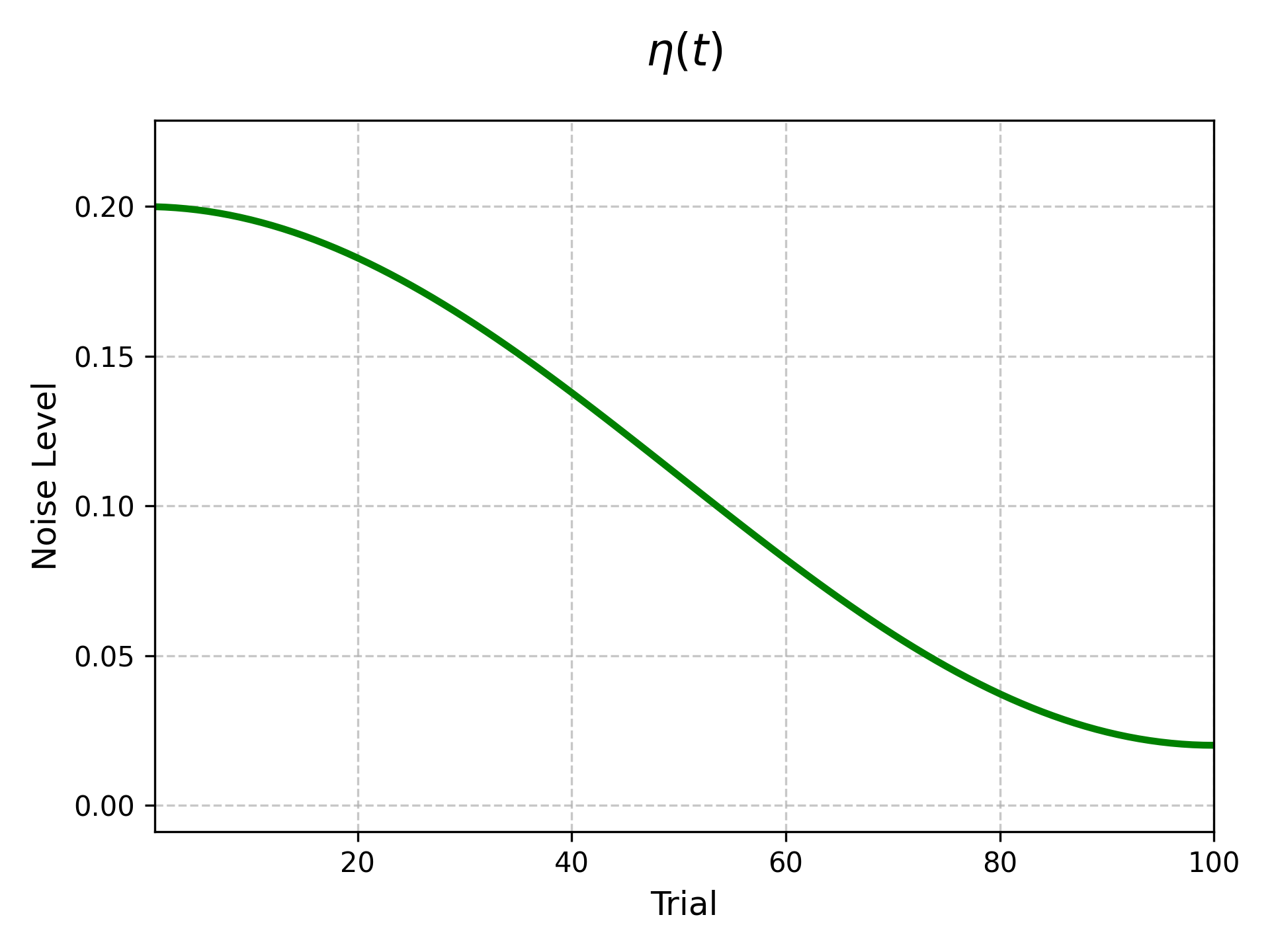
This schedule is smooth and monotone in the implemented regime: early trials use noise close to \(\eta_{\text{init}}\), while later trials approach \(\eta_{\text{final}}\). The qualitative role is the familiar exploration-to-exploitation transition.
Visualizing \(\eta(t)\)¶
The noise schedule starts high and decreases smoothly over the optimization budget.
4. Numerical Variables¶
For a numerical variable with bounds \([\text{low}, \text{high}]\), MARS behaves as follows.
4.1. Initial Phase¶
During the initial random phase:
ordinary numerical variables are sampled uniformly on \([\text{low}, \text{high}]\);
log-scaled numerical variables are sampled uniformly in log-space.
4.2. Adaptive Phase¶
After the initial phase:
Select a base value from the elite set.
For each variable, only previously observed values that are valid for the current bounds are considered.Add Gaussian perturbation.
For a non-log variable:\[ x_{\text{new}} = x_{\text{elite}} + \delta \cdot (\text{high} - \text{low}), \quad \delta \sim \mathcal{N}(0,\eta(t)). \]For a log-scaled variable, the same idea is applied in log-space.
Reflect back into bounds if necessary.
The implementation uses a dampened reflection:\[ \text{if } x < \text{low}, \quad x \leftarrow \text{low} + (\text{low} - x)/2, \]\[ \text{if } x > \text{high}, \quad x \leftarrow \text{high} - (x - \text{high})/2. \]This step is repeated until the value falls in range. The important practical property is that the overshoot is reduced geometrically, so large violations are pulled back quickly without introducing a hard clip.
4.3. Evolution Path¶
MARS maintains an evolution path for each continuous variable. When a new global best trial is found, the displacement between the old best and the new best is recorded:
The evolution path is updated with exponential smoothing:
During adaptive sampling, a small drift term is added to the perturbation:
where \(p_t\) is the progress ratio. This biases new proposals in the direction of recent improvement. The \((1 - p_t)\) factor fades the drift toward the end of the run so that late-stage refinement is not biased by early directional signal.
4.4. Small Integer Variables — Ordinal-Aware Discrete Sampler¶
For integer variables with a small range (\(\le 20\) distinct values), MARS uses a dedicated ordinal-aware sampling mechanism instead of the continuous-then-round approach.
This sampler is applied only when the variable is not log-scaled; log-scaled integers always use the continuous-then-round path of Section 4.5 regardless of range.
Initial Phase¶
During the initial random phase, a uniformly random integer in \([\text{low}, \text{high}]\) is sampled directly, where \(n_{\text{values}} = \text{high} - \text{low} + 1\).
Adaptive Phase¶
Build an elite histogram. For each elite trial, record which integer value was chosen. This gives a count vector \(\mathbf{h} \in \mathbb{R}^{n_{\text{values}}}\).
Discrete Gaussian smoothing. Define an annealing kernel width in step units:
\[ \sigma_t = 0.35 + 0.65\,(1 - p_t). \]For each bin \(j\) with \(h_j > 0\), a normalized Gaussian kernel centered at \(j\) is computed over the full grid:
\[ K_j(i) = \frac{\exp\!\bigl(-\tfrac{1}{2}\bigl(\tfrac{i-j}{\sigma_t}\bigr)^2\bigr)} {\sum_{r=0}^{n_{\text{values}}-1} \exp\!\bigl(-\tfrac{1}{2}\bigl(\tfrac{r-j}{\sigma_t}\bigr)^2\bigr)}, \]and the score vector is
\[ s_i = \sum_{j=0}^{n_{\text{values}}-1} h_j \, K_j(i). \]This spreads elite mass to neighboring integer values in an ordinal-aware way: values close to an elite value receive more mass than distant ones.
Uniform floor and sampling. A noise-dependent uniform floor is mixed in:
\[ \pi_i = (1 - \alpha)\,\frac{s_i}{\sum_r s_r} + \frac{\alpha}{n_{\text{values}}}, \quad \alpha = \frac{\eta(t)}{n_{\text{values}}}. \]The final value is drawn from this discrete distribution.
This sampler avoids the systematic rounding bias of the continuous-then-round approach and respects the ordinal structure of integer variables (nearby values are preferred over distant ones), unlike a purely categorical treatment.
4.5. Large Integer Variables and Stochastic Rounding¶
For integer variables with more than 20 distinct values, the continuous perturbation mechanism from Section 4.2 is used, followed by stochastic rounding. If \(v\) is the real-valued proposal and \(\mathrm{trunc}(v)\) denotes truncation toward zero, define
Then:
with probability \(f\), MARS rounds away from zero;
with probability \(1-f\), it keeps the truncated value.
This construction is useful because it keeps the expected rounded value equal to the original real-valued proposal:
So the integer mutation rule preserves the center of the underlying continuous perturbation instead of introducing a systematic rounding bias.
5. Categorical Variables¶
Categorical variables are stored internally as integer indices: if a categorical variable can take one of \(k\) categories, each observed value is stored as an integer in \(\{0, 1, \dots, k-1\}\) (with \(-1\) indicating an unset value). This is more memory-efficient than the previous one-hot representation and simplifies frequency counting.
5.1. Good and Bad Trial Sets¶
At an adaptive trial, MARS forms a candidate pool for categorical scoring:
if
elite_window=None, the pool is the full completed history;otherwise, the pool is restricted to the most recent
elite_windowcompleted trials.
Within that pool, the current elite schedule determines a baseline elite count \(n_{\text{elite}}(t)\). For categorical variables, MARS uses a slightly stabilized good-set size
The good set is then
and the bad set is the remainder of the same pool:
This keeps categorical sampling aligned with the same elite schedule and recency filter used in the rest of the algorithm.
5.2. Rank-Weighted Good Counts¶
For each category \(j\), MARS accumulates separate statistics over the good and bad sets. The good set is rank-weighted so that stronger elites contribute more:
where \(i\) is the 0-based rank of an elite within the good set (rank \(0\) = strongest). The worst-ranked elite still receives a strictly positive weight \(\log\!\bigl((n_{\text{good}}+1)/n_{\text{good}}\bigr) > 0\), so no elite in the good set is fully discarded.
The resulting summaries are
So categories supported by top-ranked elites receive larger good mass than categories that only appear in weaker elites.
5.3. Log-Ratio Scoring and Sampling¶
These counts are converted into smoothed probabilities
where \(k\) is the number of currently available categories and \(\alpha = 1/k\).
The categorical score is then
MARS exponentiates these scores, normalizes them, and then adds a small uniform floor \(\eta_{\text{cat}}\):
Here \(\eta_{\text{cat}}\) is a fixed smoothing constant (set to \(0.02\) in the implementation) — distinct from the time-varying noise schedule \(\eta(t)\) used for numerical variables in Section 3. Its only role is to keep all categories reachable; it does not anneal with the optimization progress.
This creates a lightweight TPE-style contrast: categories overrepresented among strong recent trials and underrepresented among weaker trials receive higher probability.
5.4. Confidence-Aware Parent Reuse¶
After the categorical probabilities \(\pi_j\) are computed, MARS may directly keep the parent elite category rather than resampling. This reuse is not unconditional.
Let
\(p_{\max}\) be the largest categorical probability,
\(p_{\text{2nd}}\) be the second-largest probability,
\(k\) be the number of currently available categories,
\(p_{\text{unif}} = 1/k\) be the uniform baseline.
If the parent category is not the top-probability category, MARS does not copy it. Otherwise, it computes
and the confidence score
Let \(\mu_t\) denote the categorical mutation probability induced by the current noise level. It is computed from \(\eta(t)\) and clipped to a safe range:
The parent-copy probability is then
This makes parent inheritance strong only when the parent category is both clearly better than the alternatives and meaningfully above the uniform baseline.
6. Iterative Procedure¶
Let \(n_{\text{init\_points}}\) denote the number of initial random trials. By default,
At each trial:
If the trial index is still in the initial phase, sample every variable directly from its search space.
Otherwise:
compute the current progress ratio \(p_t\),
compute \(n_{\text{elite}}(t)\),
update the numerical noise schedule \(\eta(t)\),
with probability \(\varepsilon_t = \varepsilon / (t+1)\), force a uniform random sample for the entire trial (epsilon-greedy exploration with harmonic decay; \(\varepsilon\) is a user-controlled constant with default \(1.0\));
otherwise, sample each variable using the elite-guided rules above.
Evaluate the objective function on the resulting point.
If the objective returns NaN, MARS raises a
ValueErrorand the optimization is aborted. Real numerical values, including positive and negative infinity, are accepted and stored.
This loop continues until the requested number of trials has been completed.
6.1. Epsilon-Greedy Exploration¶
The harmonic schedule \(\varepsilon_t = \varepsilon / (t+1)\) injects pure random exploration that decays as more trials accumulate:
early on, \(\varepsilon_t\) is close to \(\varepsilon\), so a fraction of adaptive trials sidestep the elite-guided machinery and probe the space uniformly;
late in the run, \(\varepsilon_t \to 0\), so the search behaves almost entirely as elite-guided.
Setting \(\varepsilon\) to a smaller value disables this exploration more aggressively; setting it to \(0\) removes the random override entirely.
7. Careful Theoretical Interpretation¶
The points below are best read as interpretive anchors for the implementation rather than formal equivalence statements.
7.1. Relation to Evolutionary Search¶
MARS resembles simple evolution-strategy style search in two ways:
it keeps reusing a population of strong previous trials;
it generates new candidates by mutating those trials with Gaussian noise.
What makes it distinctive here is the changing elite count and the explicit handling of mixed variable types. So it is reasonable to say that MARS is in the spirit of elite-based evolutionary search, without claiming that it is a canonical instance of a specific ES variant.
7.2. Role of the Elite Schedule¶
The term \(p_t(1-p_t)\) is the variance of a Bernoulli random variable with parameter \(p_t\). That observation is a useful interpretation because it peaks in the middle of the run and vanishes near the endpoints. In MARS, this gives a natural middle-heavy elite schedule:
little averaging early, when evidence is scarce;
more averaging in the middle, when diversity is useful;
tighter concentration late, when refinement matters more.
This is an intuition for the schedule, not a claim that the Bernoulli model is the generative model of the algorithm.
7.3. Role of Cosine Annealing¶
The cosine schedule gives a smooth reduction in perturbation scale. Its value here is mainly practical:
no abrupt change in search behavior,
larger mutations at the start,
smaller mutations near the end.
This mirrors the role of cosine schedules in other optimization contexts, such as learning-rate scheduling, but it should be understood here as a heuristic design choice for finite-budget black-box search.
7.4. Dampened Reflection¶
The dampened reflection rule can be interpreted as a stable alternative to hard clipping or full reflection:
unlike clipping, it preserves some information about the direction and size of the overshoot;
unlike full reflection, it shrinks the overshoot each time it crosses a boundary.
The implementation therefore behaves like a repeated contraction on the overshoot amount, which is enough to explain why out-of-range proposals return to the feasible interval quickly. That observation is the practically relevant point; stronger fixed-point claims are unnecessary here.
7.5. Evolution Path¶
The evolution path can be interpreted as a lightweight cumulative step-size adaptation mechanism, related in spirit to the path-length control used in CMA-ES. The key differences are:
MARS tracks only the direction of improvement between successive global bests, not the full mutation distribution;
the drift decays with progress, acting as a soft momentum that fades into pure local refinement.
This provides a directional bias when the objective has a consistent gradient-like structure, without adding significant computational overhead.
7.6. Ordinal-Aware Integer Sampling¶
The small-integer sampler can be seen as a kernel density estimate on a discrete grid:
each elite value places a normalized Gaussian kernel on the integer lattice;
the kernel width \(\sigma_t\) anneals from broad (exploratory) to narrow (exploitative);
the uniform floor prevents starvation of any integer value.
This respects the ordinal structure of integers (nearby values are more similar) while avoiding the rounding artifacts of the continuous-then-round approach. For large integer ranges, stochastic rounding remains the practical choice since the kernel approach would be unnecessarily expensive.
7.7. Stochastic Rounding¶
The most defensible theoretical property of the integer rule (used for large integer ranges) is its unbiasedness:
deterministic rounding shifts the center of the proposal distribution;
stochastic rounding preserves it in expectation.
That makes the integer sampler a natural extension of the numerical mutation rule rather than a separate ad hoc mechanism.
7.8. Categorical Sampling with Good/Bad Contrast¶
The categorical update combines two complementary mechanisms:
Good/bad contrast: the exploit branch compares how strongly each category appears in the current good set versus the rest of the active pool. The log-ratio \(\log p^{\text{good}} - \log p^{\text{bad}}\) favors categories that separate strong trials from weak ones.
Rank-weighted good set with a stabilized floor: categorical decisions are made from a slightly larger top-ranked set than the raw elite schedule would sometimes provide. This reduces brittleness when the generic elite count becomes too small for reliable categorical evidence.
Confidence-aware parent reuse: the implementation may directly keep the parent elite category, but only when that category is already the top-probability option and its advantage over both the uniform baseline and the second-best category is strong enough. This preserves local structure without forcing premature categorical lock-in.
This is closely related in spirit to TPE-style density-ratio reasoning, but it should be interpreted as a practical heuristic layered on top of the existing elite-based search rather than as a full Parzen-estimator model.
8. References¶
Beyer, H.-G. and Schwefel, H.-P. (2002). Evolution strategies: A comprehensive introduction. Natural Computing, 1(1):3–52.
Loshchilov, I. and Hutter, F. (2016). SGDR: Stochastic gradient descent with warm restarts. In International Conference on Learning Representations (ICLR).
Rechenberg, I. (1973). Evolutionsstrategie: Optimierung technischer Systeme nach Prinzipien der biologischen Evolution. Frommann-Holzboog, Stuttgart.
Schwefel, H.-P. (1995). Evolution and Optimum Seeking. Wiley, New York.